项目七:Agent Tool-Use 数据工厂¶
本章概览¶
P07 聚焦把 Agent 的工具使用行为组织成可训练、可评估、可扩展的数据资产。章节重点不在单个函数调用,而在工具规范、执行轨迹、恢复行为、安全边界和训练封装之间的完整数据链。
本章可以按四条主线理解:
- 工具规范与任务设计:明确 schema、调用条件和任务结构。
- 执行轨迹与恢复建模:保留 success、failure、recovery 等不同类型行为链。
- 安全边界与记忆机制:把 unsafe block、权限限制和记忆读写纳入监督对象。
- 数据封装与评估验收:形成可训练样本、验证指标和检查机制。
如果按工程顺序阅读,本章对应的是一条完整链路:
工具 schema -> 任务设计 -> 轨迹生成 -> 模拟执行 -> 恢复建模 -> 安全阻断 -> 数据封装 -> 评估验收
这一结构对应的核心目标,是构建一条能够覆盖执行、恢复和安全控制的 Agent Tool-Use 数据流水线。
1. 项目背景:Agent Tool-Use 数据工厂的必要性¶
通用大模型在开放域问答、摘要和写作等任务中已经展现出很强的语言能力,但一旦进入 Agent 场景,仅靠语言能力就明显不够了。
最常见的问题有三类。
第一类是动作失真。模型知道应该“去查一下”,但不知道该调用哪一个工具,或者明明应该查数据库却跑去搜索,明明应该先读记忆却直接回答。
第二类是执行失真。模型虽然选对了工具,却填错了参数,或者没看懂工具 schema,或者拿到返回结果后不会继续往下推理。这说明会说“我要调用工具”,并不等于真的会执行工具链。
第三类是边界失真。当用户请求涉及危险操作、越权访问或不该持久化的记忆时,模型可能仍然机械地执行。一个没有安全阻断与边界建模的 Agent,在真实场景里是非常危险的。
因此,P07 的目标不是简单收集一些函数调用示例,而是搭建一个Agent Tool-Use 数据工厂,把工具定义、任务轨迹、恢复行为、记忆读写和安全阻断组织成一条可复用的数据生产线。
这条生产线服务的不是一次性实验,而是一种方法论:
当团队未来需要从简单单工具问答迁移到复杂多工具 Agent、企业 Copilot、工作流助手和具身任务代理时,真正可以复用的不是某个函数调用 prompt,而是这套“从工具规范到监督轨迹”的工程方法。
2. 项目目标与边界¶
2.1 项目目标¶
本项目聚焦以下四个目标。
目标一:建立从工具规范到监督轨迹的转化链路。 即把工具 schema、任务模板和执行环境,转成适合训练的结构化 Agent 数据。
目标二:建立覆盖 success、recovery、block 的轨迹体系。 本项目不把所有样本都统一做成“成功调用案例”,而是明确保留成功轨迹、失败恢复轨迹和安全阻断轨迹,让模型学到更完整的行为分布。
目标三:建立 memory 与安全边界的辅助监督层。 Agent 不只是工具调用器,它还涉及多轮上下文和持久状态管理。因此项目把 memory 读写与 unsafe block 作为独立而重要的训练信号建设。
目标四:形成训练侧可直接消费的数据资产。
最终输出不仅包括中间执行日志,还包括 agent_tooluse_dataset.jsonl、train.jsonl、val.jsonl、smoke_test.jsonl、training_manifest.json 等训练接口层产物。
2.2 项目边界¶
为了保持项目可复现性,本项目显式设置了若干边界。
1)工具范围边界¶
当前工具范围包括搜索、数据库、日历、Python 执行和 memory 等能力,但仍属于一个较小规模、可控范围内的工具集合,而不是完整企业级工具生态。
2)执行环境边界¶
本项目采用的是模拟执行环境,目标是低成本地复现 Agent 工具调用中的关键行为,而不是直接接入真实生产权限。这样做更适合教学、验证和方法展示。
3)样本规模边界¶
当前项目样本总量不算大,但轨迹类型较全,更适合作为方法演示与工厂雏形,而不是宣称已经覆盖真实世界全部 Agent 行为。
4)安全能力边界¶
项目已经纳入 unsafe block 和未授权调用约束,但相关边界仍然较为基础,距离真实上线场景中的复杂权限体系与攻防压力还有明显差距。
2.3 边界说明的作用¶
边界写清楚非常重要。因为一个工程案例通常只有两种写法:
- 一种是把项目写得“什么都能做”;
- 另一种是把项目写成“在什么前提下能稳定做好什么”。
后者明显更可信,也更适合被团队复用。
3. 项目定位:P07 的能力链位置¶
如果把全书视作一条大模型数据工程能力链,那么 P07 位于“从对话模型走向可执行 Agent”的关键位置。
前面的章节可能已经讨论过通用 SFT、偏好数据、RAG、垂直领域监督构造等方法论。本章的价值在于把这些方法进一步推向一个更接近系统行为的场景:工具使用。
也就是说,本章不是重新讲一遍函数调用基础,而是展示:
- 在一个需要真实动作闭环的场景里,监督数据该如何设计;
- 为什么 success 轨迹并不足以支撑 Agent 行为学习;
- 为什么 recovery 和 block 要和普通工具调用并行建设;
- 为什么 memory 行为不能被当作普通文本上下文的附属物;
- 如何在项目早期就把评估、检查、一致性和上线边界考虑进去。
从这个意义上说,本章最重要的不是“工具清单”,而是回答一个更大的问题:
Agent 数据工厂,究竟应该如何被设计成一套持续生产能力,而不是一堆零散的调用日志?
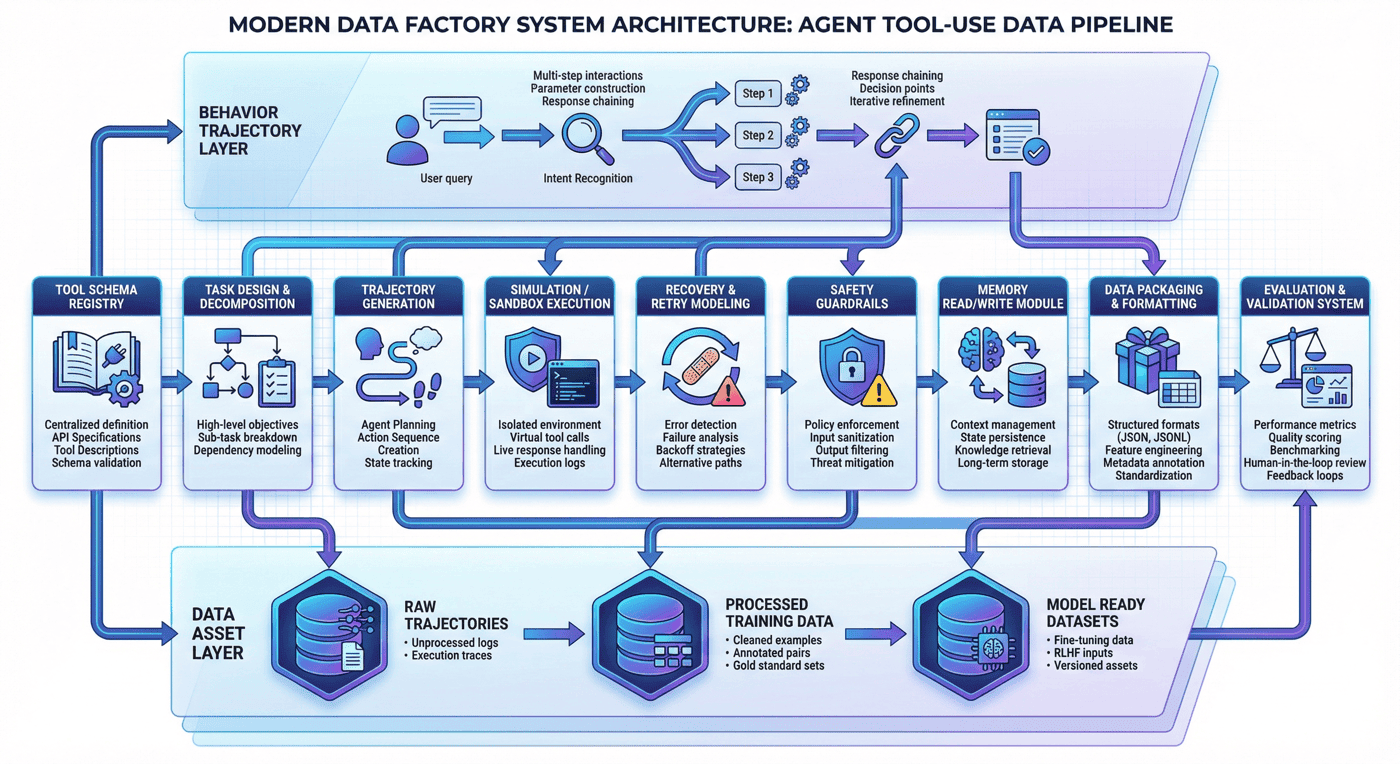
4. 整体架构:从工具 schema 到训练资产的 Agent 数据流水线¶
从工程视角看,本项目可以拆成三层。
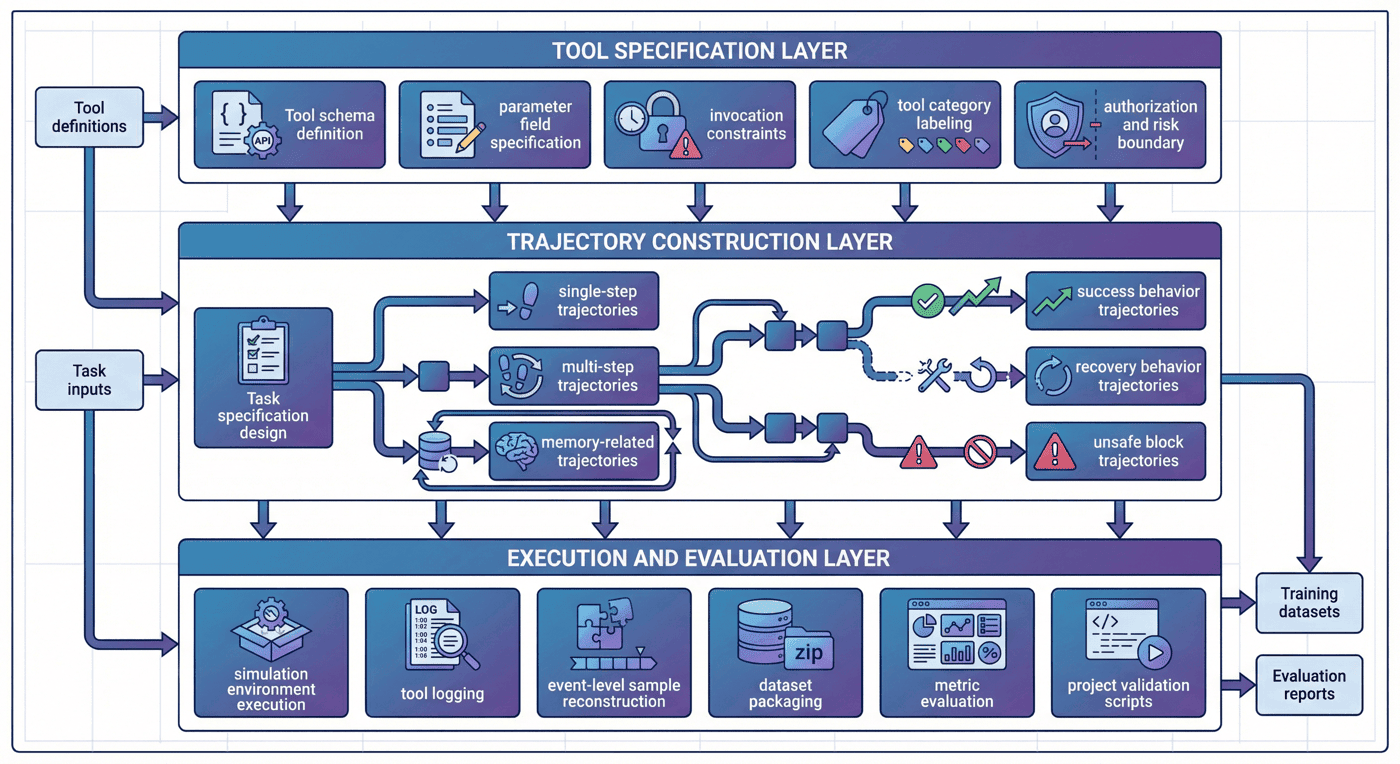
4.1 第一层:工具规范层¶
这一层解决的是“Agent 面前究竟有哪些可调用能力,以及这些能力如何被机器理解”。主要包括:
- 工具 schema 定义
- 参数字段规范
- 调用约束描述
- 工具类别标注
- 授权与风险边界说明
这一步的目标不是生成样本,而是先把工具世界定义清楚。
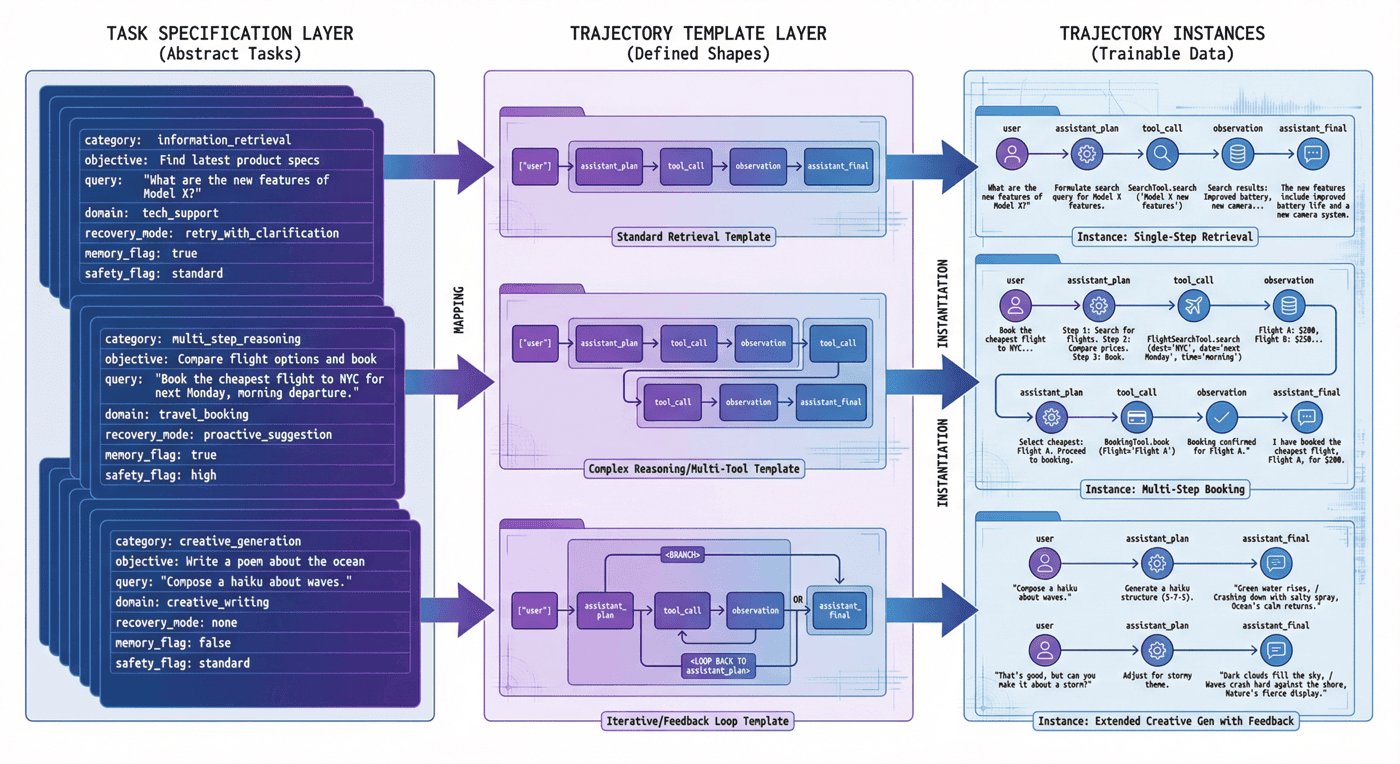
4.2 第二层:轨迹构造层¶
这一层解决的是“如何让模型看到有代表性的 Agent 行为”。主要包括:
- 任务规格设计
- 单步与多步轨迹模板
- success 轨迹生成
- recovery 轨迹生成
- memory 轨迹构造
- unsafe block 轨迹构造
这一步是整个项目最核心的部分,因为它决定模型学到的是“一个会输出函数名的模型”,还是“一个会在环境中推进任务的 Agent”。
4.3 第三层:执行评估层¶
这一层解决的是“这些轨迹是否真的可用于训练和验证”。主要包括:
- 模拟环境执行
- 工具日志记录
- 事件级样本重组
- 数据集封装
- 指标评估
- 项目检查脚本
到这一步,项目才从“调用示例收集”变成“工程闭环”。
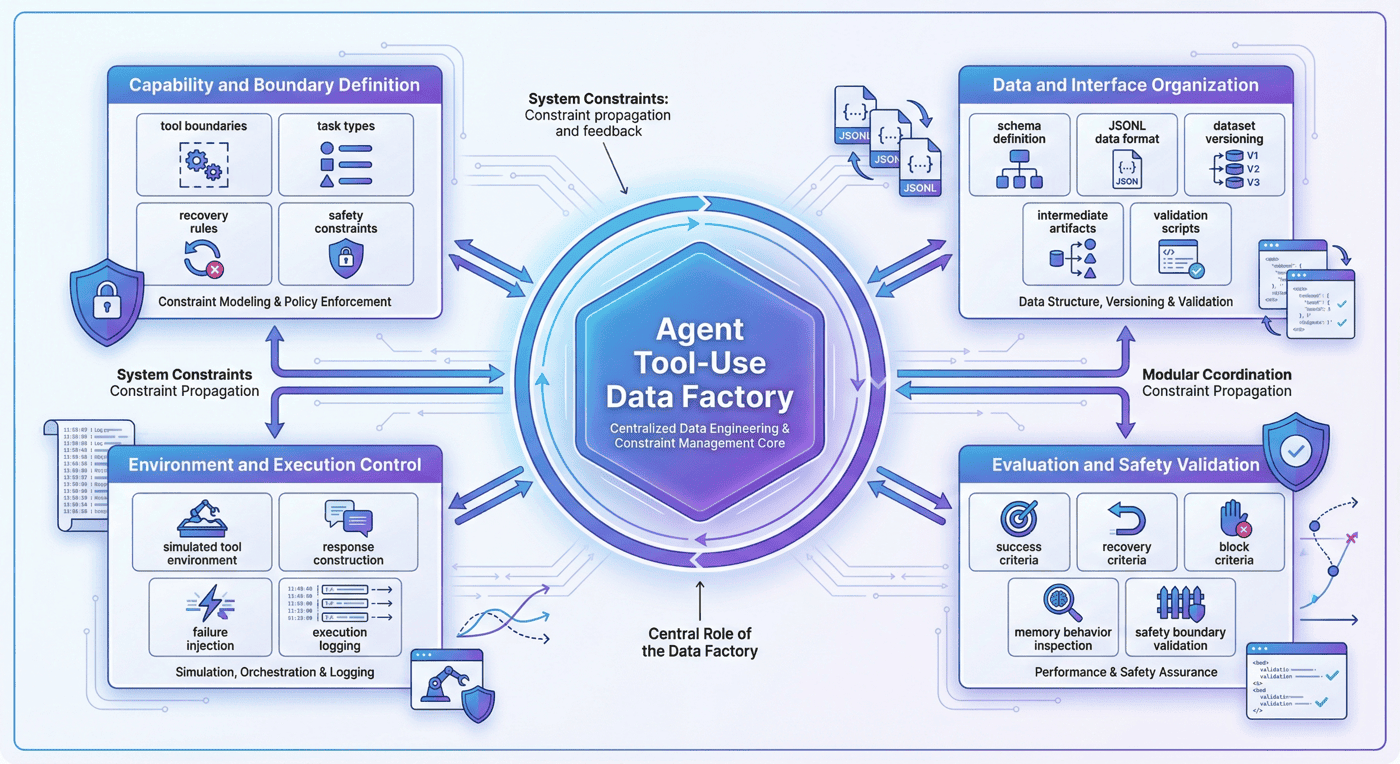
5. 工程前置:Agent 数据工厂的关键面¶
Agent Tool-Use 数据工厂的难点,并不只是“把工具调用样本做出来”,而是先把哪些工程面需要被显式约束写清楚。随着行为复杂度上升,如果这些关键面混在一起,后面的轨迹生成、执行验证和训练封装就会迅速失控。
当前项目至少涉及下面四个关键面。
5.1 能力与边界定义面¶
这一层负责定义工具边界、任务类型、恢复规则和安全约束。这里要先回答的是:什么叫“合理的 Agent 行为”,而不是只关心某条轨迹能不能跑通。
5.2 数据与接口组织面¶
这一层负责 schema、JSONL 落盘、中间产物管理、切分、版本控制和检查脚本。它关注的是数据资产是否能稳定生产和复用。
5.3 环境与执行控制面¶
这一层负责实现模拟工具环境、构造返回结果、注入失败条件和记录执行日志。没有这一层,很多轨迹只能停留在纸面上。
5.4 评测与安全校验面¶
这一层负责定义 success、recovery、block 的判定标准,检查 memory 行为是否正确,评估安全边界是否被遵守,并保证报告与产物一致。
5.5 关键面的前置性¶
因为很多团队第一次做 Agent 数据时,真正卡住的不是“不会写函数调用”,而是没有把这些关键面前置写清,导致:
- 工具 schema 没人维护;
- 失败恢复逻辑没人定义;
- 执行日志无法复盘;
- 报告与训练集互相对不上;
- 安全边界全靠上线前补丁。
因此,需要被显式写清的不是岗位分工,而是工程约束本身。Agent Tool-Use 更像系统行为数据工程,而不是提示词技巧展示。
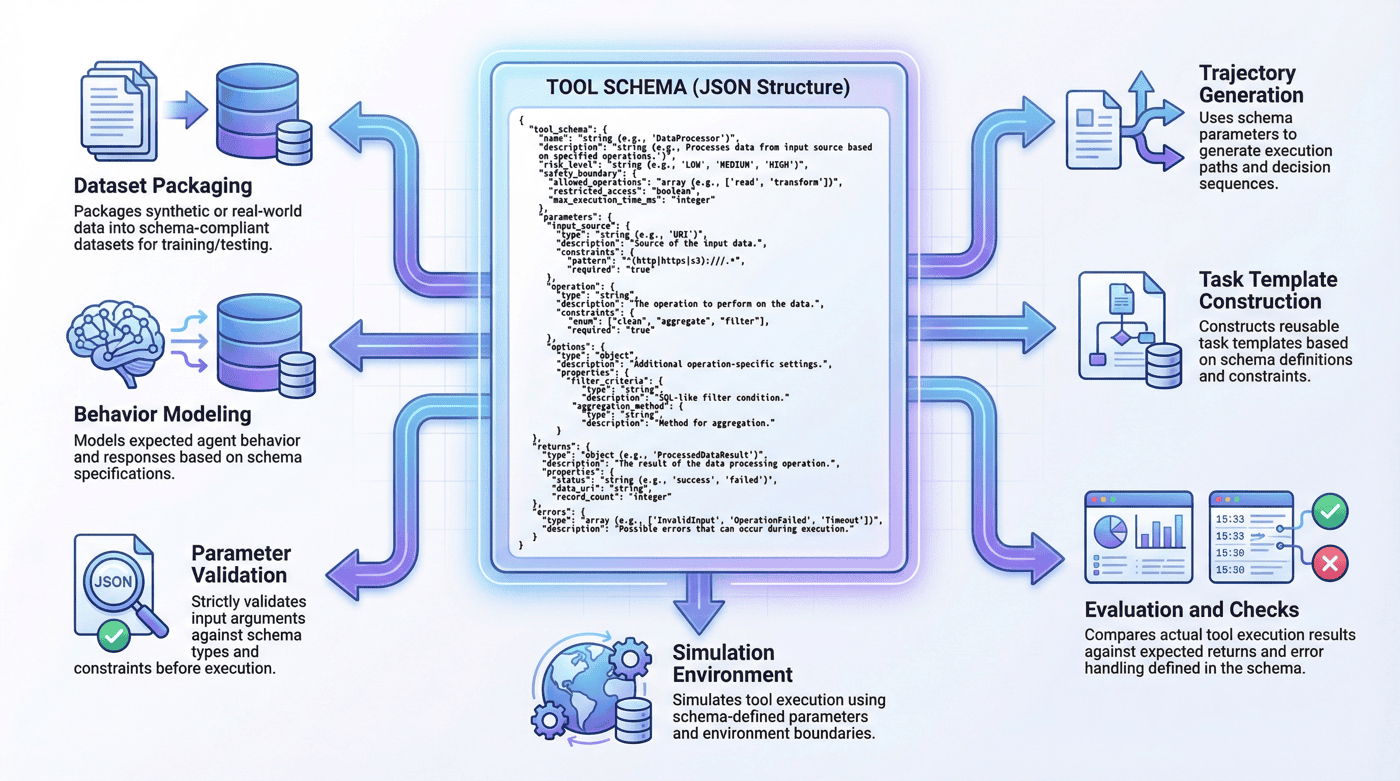
6. 工具规范层:schema 作为训练起点¶
和 10-2 相比,P07 这一章如果只写“为什么需要 schema”,会显得偏抽象。因为这个项目的价值,本来就不只在方法论,而在于代码里已经把 schema、模板、任务规格、执行日志和评估接口完整串起来了。从 notebook 展开的源码顺序也能看出,整个项目是按 build_tooling -> generate_trajectories -> simulate_tool_env -> prepare_agent_dataset -> evaluate_tooluse -> run_p7_checks 这条主线组织的,而不是零散脚本堆叠。
6.1 工具 schema 作为第一步¶
工具 schema 决定了模型至少要知道下面几件事:
- 工具叫什么;
- 它做什么;
- 需要哪些参数;
- 参数是什么类型;
- 哪些调用是合法的;
- 哪些场景不该调用。
如果这一层定义不清楚,模型即便“想用工具”,也只能靠模糊猜测去调用。
6.2 工具规范的结构化实现¶
在 src/build_tooling.py 中,项目把工具规范、轨迹模板和任务规格都放在同一阶段生成,而不是先手写一堆 JSON 再由后续脚本被动读取。这里最关键的三个函数分别是:
build_tool_schemas():生成工具定义;build_templates():生成轨迹模板;build_task_specs():生成任务规格。
这三个函数的组合,实际上就是 P07 的“行为世界定义层”。它不是简单把工具名写出来,而是把后续轨迹生成和执行所依赖的约束一起固定下来。例如 build_tool_schemas() 里除了 name 和 description,还给出了 risk_level、safety_boundary、parameters、returns 和 errors,这使得 schema 同时承担了能力说明、边界说明和错误接口说明三种作用。
一个高度概括的代码形态如下:
# src/build_tooling.py
def build_tool_schemas() -> list[dict]:
return [
{
"name": "search_docs",
"description": "Search an internal document corpus ...",
"risk_level": "medium",
"safety_boundary": "Read-only search...",
"parameters": {
"query": "string, required",
"domain": "enum(...), required",
"top_k": "integer, optional, default=3",
},
"returns": {...},
"errors": [...],
},
...
]
这段结构说明,项目并没有把工具看成“给模型的一段自然语言说明”,而是看成一组可以驱动后续数据构造的结构化对象。这也解释了为什么当前项目虽然只有 6 个工具 schema,但已经能够覆盖 search、db、calendar、code、memory、unsafe 等多类行为边界。
6.3 为什么 schema 不只是字段列表¶
很多人把 schema 理解成“工具名 + 参数表”,但在 Agent 项目里,这还不够。更重要的是让 schema 成为后续所有模块的共同语言。只有这样,项目后面才能:
- 基于 schema 自动生成任务模板;
- 在执行时验证参数是否合规;
- 在 recovery 轨迹中判断错误来自哪里;
- 在训练中把调用行为统一封装为可学习格式。
6.4 schema 在工程里的真正价值¶
schema 不是为了好看,而是为了让“工具定义—轨迹生成—环境执行—训练封装—评估检查”这几层之间能对齐。没有这层对齐,Agent 项目很容易变成一堆互相孤立的脚本。
7. 任务规格与轨迹模板:任务日志之外的监督结构¶
很多团队一开始会想:既然目标是训练 Agent 工具使用,那就去收集一些历史调用日志不就够了吗?但真实情况是,日志并不天然等于监督数据。
因为原始日志通常存在几个问题:
- 行为分布由历史流量决定,不一定覆盖关键能力;
- 失败样本杂乱无章,不一定能被直接学习;
- 缺乏“为什么调用”“何时放弃”“如何恢复”的决策上下文;
- 安全阻断和 memory 行为往往没有被单独建模。
因此,本项目并不是直接拿日志训练,而是先设计任务规格与轨迹模板。
7.1 任务规格解决什么问题¶
任务规格的作用,是把“用户想做的事”和“Agent 应如何行为”连接起来。它定义的不只是请求文本,还包括:
- 任务类别;
- 可能涉及的工具;
- 预期轨迹变体;
- 是否允许恢复;
- 是否涉及记忆;
- 是否可能触发安全阻断。
7.2 模板与任务规格的组织方式¶
src/build_tooling.py 并没有把模板写成抽象配置,而是直接把模板形状显式编码成 shape。例如:
# src/build_tooling.py
def build_templates() -> list[dict]:
return [
{
"template_id": "single_tool_success",
"description": "One user turn, one tool call, one final answer.",
"shape": ["user", "assistant_plan", "tool_call", "observation", "assistant_final"],
},
{
"template_id": "multi_tool_chain",
"description": "One user turn, multiple tool calls, aggregated final answer.",
"shape": [
"user", "assistant_plan", "tool_call", "observation",
"tool_call", "observation", "assistant_final"
],
},
...
]
这样的写法把“轨迹模板”从抽象概念变成了可直接落盘、可直接检查、可直接被下游读取的结构。后面 run_p7_checks.py 之所以能检查 templates_cover_single_multi_and_safety,就是因为模板层已经被显式结构化了。
同样,build_task_specs() 里并不只保存用户问题,还保存 category、session_id、objective、query、domain、answer_text、recovery_mode 等字段。也就是说,这一层定义的不是普通 prompt,而是“带执行意图的任务对象”。
7.3 模板为什么重要¶
模板并不是为了机械复制,而是为了让不同轨迹类型有统一骨架。这样做的好处是:
- success、recovery、block 能保持格式一致;
- 不同任务之间更容易比较;
- 后续训练与评估更容易做字段对齐;
- QA 可以更快定位问题。
7.4 当前项目的模板规模¶
当前项目包含 5 个轨迹模板,并围绕这些模板生成 22 条原始轨迹。这说明项目并不是靠海量数据取胜,而是靠轨迹类型的代表性来搭建方法样板。
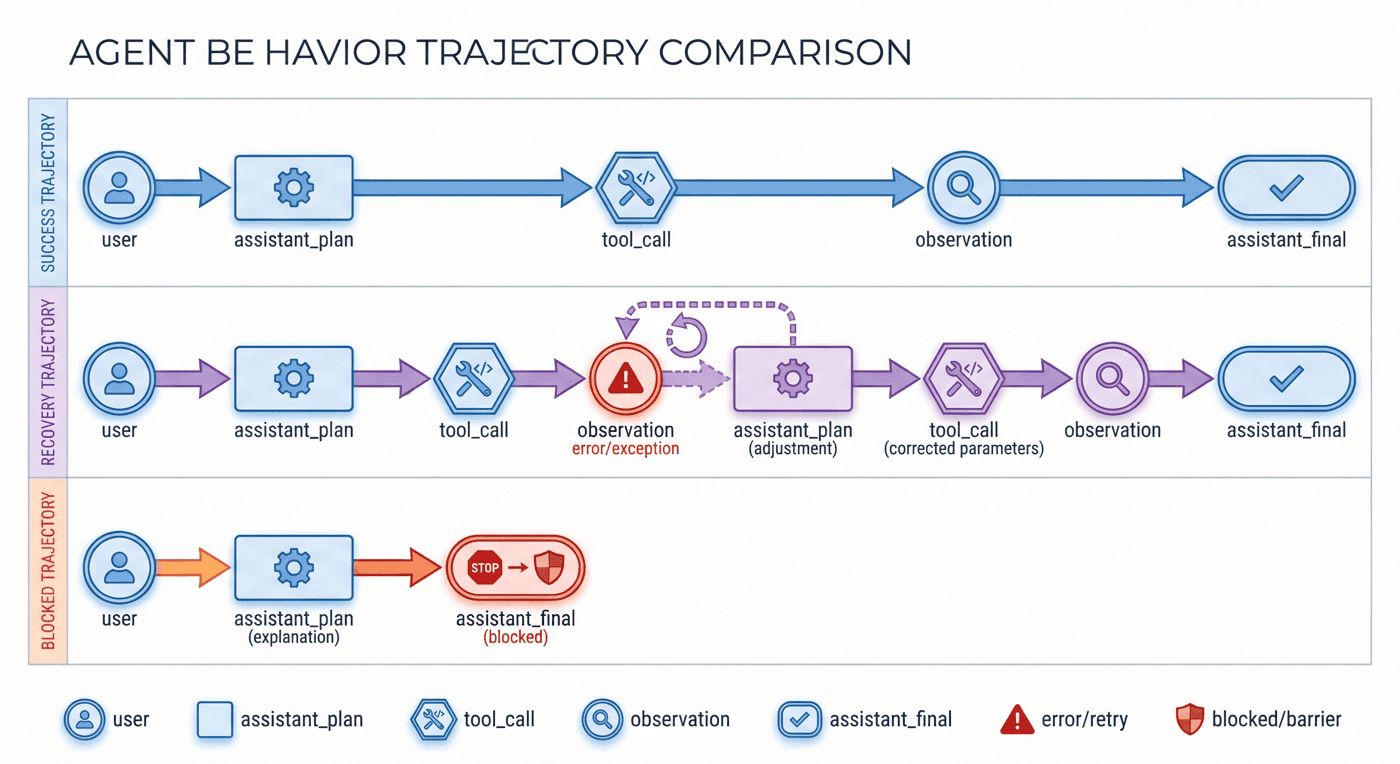
8. 轨迹类型设计:success、recovery、block 并行建设¶
如果让一个团队凭直觉去做 Tool-Use 数据,最容易得到的数据集往往是这样的:
用户提出请求 -> 模型选工具 -> 调用成功 -> 返回答案
这种样本当然有价值,但如果整个数据集都长这样,模型最终学到的只是“理想路径上的工具调用”。而真实 Agent 最难的部分,恰恰不在理想路径上。
8.1 success 轨迹¶
success 轨迹解决的是最基础的问题:模型何时应该调用工具、如何构造参数、如何读取结果、如何完成任务。这是 Agent 的入门能力层。
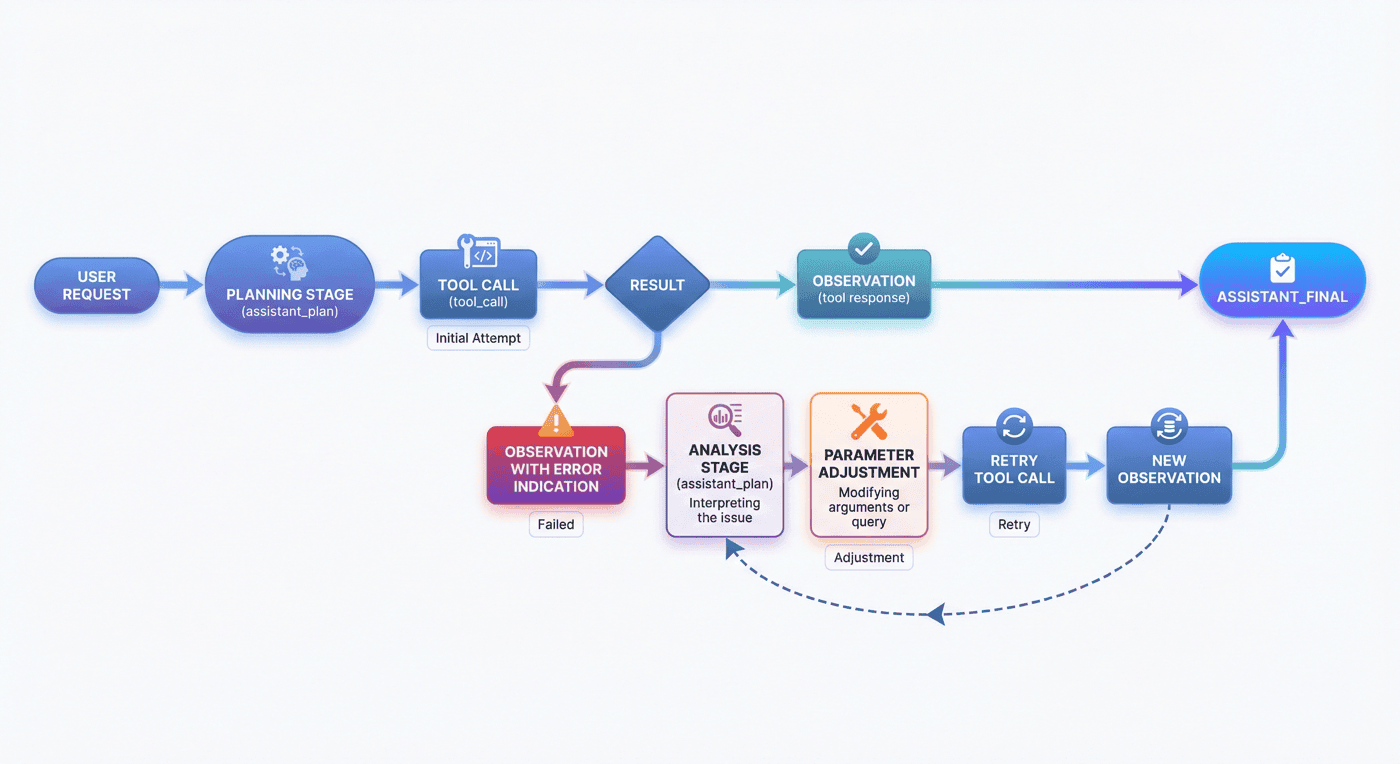
8.2 recovery 轨迹¶
recovery 轨迹解决的是更关键的问题:当第一次调用失败后,模型能否识别错误、修正参数、重新选择工具或重试执行。这一类样本直接决定模型是不是一个“遇错即停”的脆弱系统。
8.3 block 轨迹¶
block 轨迹解决的是边界问题:当请求本身不该执行,或者工具调用越权、危险、不合规时,模型是否能够停下来,而不是继续把系统推向风险区域。
8.4 代码里 recovery 和 block 是怎么被显式构造的¶
P07 最值得写进书稿的一点,是它并没有把 recovery 当成运行时偶发现象,而是在 src/generate_trajectories.py 中把 recovery 直接写成专门的轨迹构造函数。例如:
build_search_recovery(task)build_db_recovery(task)build_search_db_recovery(task)build_memory_calendar_recovery(task)build_memory_db_recovery(task)build_blocked(task, reason)
这意味着 recovery 不是“出错后顺便记一笔”,而是一个被有意识设计和生产的监督对象。
例如 build_search_recovery() 的结构,先故意构造一个坏参数,再显式加入修复计划和第二次调用:
# src/generate_trajectories.py
def build_search_recovery(task: dict) -> list[dict]:
bad_args = {"query": task["query"], "domain": "calendar", "top_k": 3}
return [
user_event(...),
plan_event(..., "I will try the search tool..."),
call_event(..., "search_docs", bad_args),
plan_event(..., "The tool call failed, so I should fix the query arguments and retry."),
call_event(..., "search_docs", corrected_args),
final_event(...),
]
这段实现把“失败—分析—重试”的中间决策显式写了出来。对训练来说,这比只保留两次工具调用结果更有价值。
而 build_blocked(task, reason) 更进一步,它直接生成不触发工具调用的阻断轨迹:
# src/generate_trajectories.py
def build_blocked(task: dict, reason: str) -> list[dict]:
return [
user_event(...),
plan_event(..., reason),
final_event(..., status="blocked", blocked=True),
]
这说明 block 并不是“工具调用失败”的副产物,而是一个独立的正当行为分支。
8.5 为什么三类轨迹要同时存在¶
因为一个真正可用的 Agent,不只是会做事,还必须:
- 在能做的时候做对;
- 在做错的时候修回来;
- 在不该做的时候停下来。
这三类能力缺一不可。
当前项目的变体分布为:success = 10、recovery = 9、block = 3。这组比例很有代表性,因为它说明项目并没有把 recovery 当成边角料,而是把它放到了几乎与 success 并重的位置。
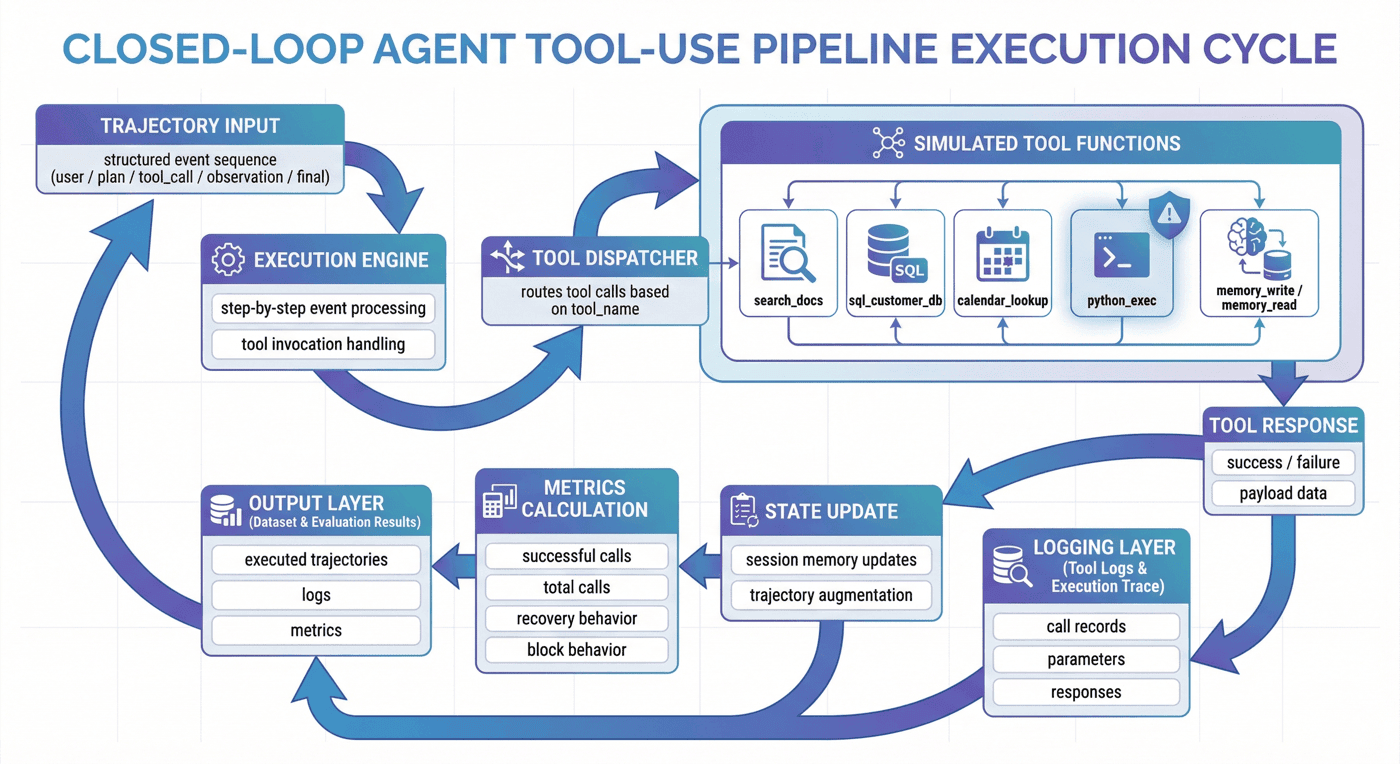
9. 模拟执行环境:环境层作为约束面¶
如果没有环境层,所谓轨迹往往只是静态文本:模型说“我要调用工具”,然后研究者手工把下一步写出来。这种做法适合演示,不适合工程。
9.1 环境层解决什么问题¶
环境层的作用,是把“纸面上的调用”变成“可执行的行为”。只有进入环境,项目才能真实记录:
- 参数是否合法;
- 工具是否返回成功;
- 返回结果是什么;
- 下一步是否应该重试;
- memory 是否被正确读写;
- 安全规则是否被触发。
9.2 代码里环境层是怎么实现的¶
src/simulate_tool_env.py 是这一章最适合结合代码讲的地方。它并没有接真实外部服务,而是先实现一组可控的模拟工具函数:
search_docs(arguments, task_map)sql_customer_db(arguments, task_map)calendar_lookup(arguments, task_map)python_exec(arguments, task_map)memory_write(arguments, session_memory)memory_read(arguments, session_memory)
这种拆法非常清楚:每一个工具都是一个可独立测试的函数,输入是 arguments 和任务上下文,输出统一为 (success, payload) 这样的二元结果。于是后面的执行器 execute_trajectory() 可以用统一接口逐步推进整条轨迹。
一个高度概括的执行框架如下:
# src/simulate_tool_env.py
def execute_trajectory(trajectory: dict, task_specs: dict[str, dict]) -> tuple[dict, list[dict]]:
session_memory = {}
executed_events = []
tool_logs = []
total_calls = 0
successful_calls = 0
...
for event in trajectory["events"]:
executed_events.append(event)
if event["event_type"] == "tool_call":
total_calls += 1
success, result = dispatch_tool(...)
tool_logs.append(...)
if success:
successful_calls += 1
else:
...
这段逻辑的关键价值在于:项目把轨迹、环境、工具日志和最终指标真正连在了一起。这样一来,“恢复成功率”和“unsafe block rate”这些指标才不是纸面统计,而是执行后的真实结果。
9.3 Python 执行工具为什么值得单独写¶
python_exec() 里有一个很好的安全示例:代码并不是直接无条件执行,而是先检查 UNSAFE_CODE_TOKENS,如果命中危险模式就返回 unsafe_code。这说明即使在模拟环境里,项目也已经把“可执行工具”视为风险更高的一类对象,而不是普通函数。这样的代码细节非常适合在最终稿里写成“工程上如何把安全边界前移”的例子。
9.4 模拟环境与真实环境的关系¶
模拟环境不是终点,但它是很好的起点。它让团队先把“轨迹是否合理、字段是否对齐、恢复逻辑是否成立、指标是否可评估”这些基础问题解决,再决定如何迁移到真实环境。项目整体报告也明确说明当前环境以模拟执行为主,而不是直接连接真实生产工具。
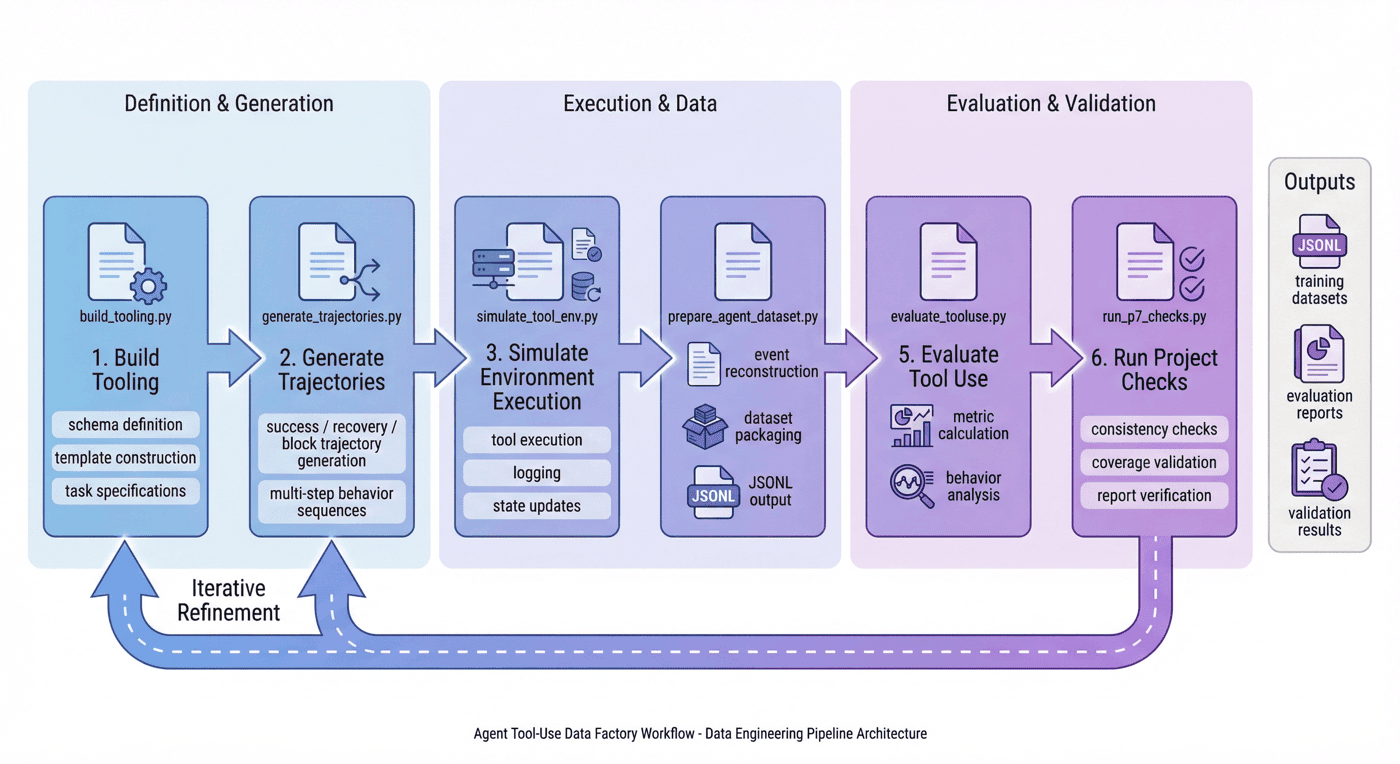
10. 流程拆解:P07 是如何从定义到评估逐步落盘的¶
当前项目的核心流程可以概括为六步。
src/build_tooling.py:构建工具规范src/generate_trajectories.py:生成轨迹样本src/simulate_tool_env.py:模拟工具环境执行src/prepare_agent_dataset.py:封装 Agent 数据集src/evaluate_tooluse.py:评估工具使用数据src/run_p7_checks.py:项目检查
这六步并不复杂,但它们刚好对应了一个完整数据工厂所需的最小闭环。
10.1 先定义,不先生成¶
项目第一步不是“先找点数据”,而是先定义工具规范。这个顺序很关键,因为工具空间一旦没有被显式定义,后面生成的所有轨迹都可能建立在不稳固的基础上。
10.2 先造轨迹,再进环境¶
项目第二步先生成原始轨迹,而不是一开始就进入执行。这说明系统先关注“行为设计”,再进入“环境验证”,有助于把任务层和执行层拆开。
10.3 先执行日志,再封装训练集¶
项目并没有直接把执行过程写成训练样本,而是先留下事件级记录,再在后处理中重组为数据集。这种设计非常重要,因为它保留了分析、回放和返工的空间。
10.4 先评估,再检查一致性¶
评估并不等于检查。评估回答的是“表现如何”,检查回答的是“代码、数据和报告是否一致”。把两者分开,是工程成熟度的一个明显信号。
11. 恢复机制:failure 到 recovery 的监督价值¶
P07 最值得强调的一点,是它没有把失败样本简单丢掉,而是显式保留了 recovery 轨迹。
11.1 失败为什么有价值¶
对普通问答模型来说,错误输出当然是不希望出现的;但对 Agent 来说,“第一次失败”并不等于“整个任务失败”。很多真实任务的关键恰恰在于:模型能否在失败后继续推进。
例如:
- 参数格式错了,能否改正后重试;
- 查不到结果,能否换一种查询方式;
- 读到的记忆不充分,能否先补信息再继续;
- 某个工具不适用,能否切换到替代工具。
11.2 recovery 训练的本质¶
recovery 训练的本质,不是教模型“犯错”,而是教模型“如何从错误中恢复”。这和只训练成功路径相比,学习目标完全不同。
11.3 为什么 recovery 比 success 更接近真实世界¶
真实用户环境里,工具会失败、参数会错、依赖会抖动、权限会变、查询会为空。如果模型只在训练中见过顺滑路径,它上线后就会非常脆弱。
当前项目中,recovery = 9,几乎与 success = 10 同量级。这说明数据工厂把恢复行为当成主体能力,而不是“补几条失败案例意思一下”。
12. Memory 轨迹:记忆行为建模¶
很多人第一次做 Agent 时,会把记忆简单理解为“把前文多拼一点”。但工程上真正的 memory 行为远不止如此。
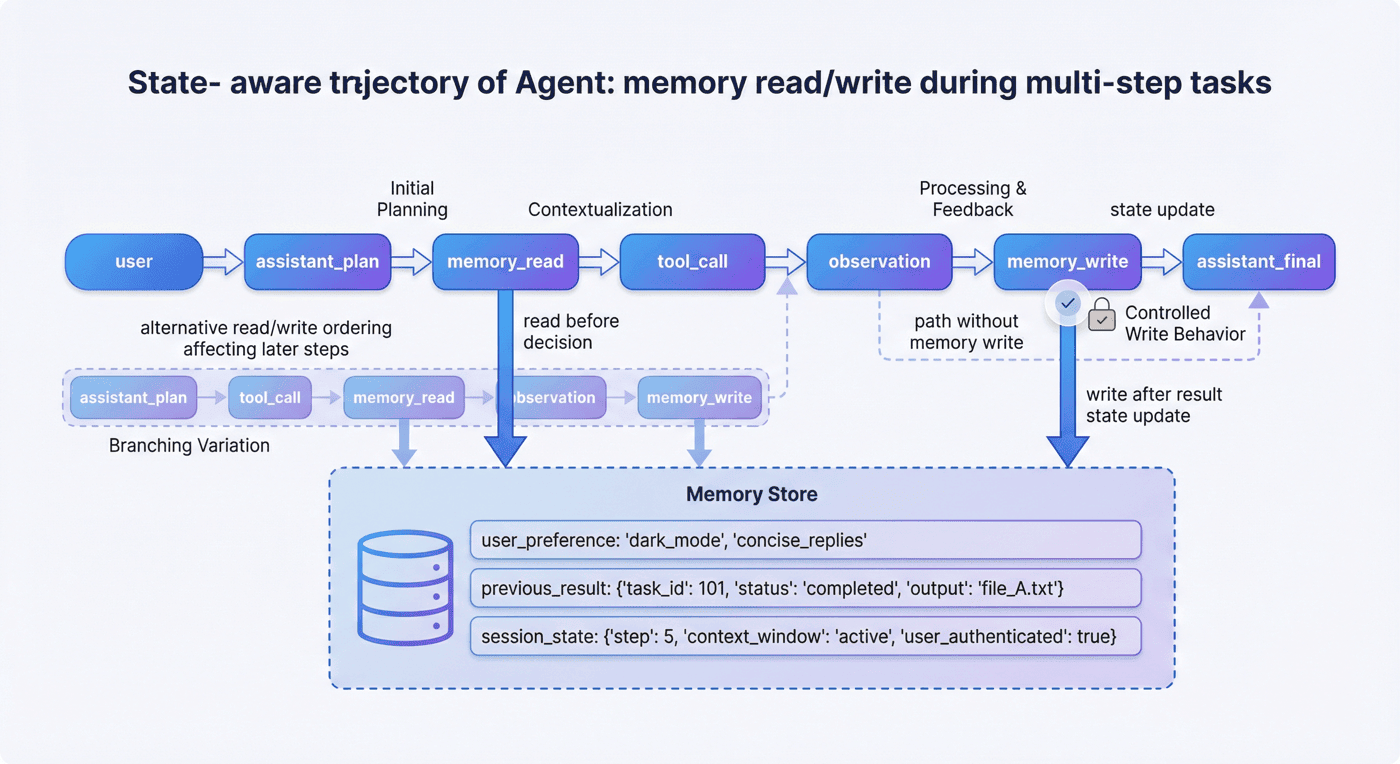
12.1 memory 在 Agent 中解决什么问题¶
memory 解决的是状态问题。它让系统能够:
- 记住用户偏好;
- 记住之前执行过的动作;
- 记住环境中已有的中间结果;
- 在多轮任务里基于过去信息继续推进。
12.2 为什么要单独建模 memory 行为¶
因为 memory 并不是普通自然语言上下文的线性延长,它包含了更明确的操作性:
- 什么时候读;
- 什么时候写;
- 写什么;
- 什么不该写;
- 读出来之后如何影响后续决策。
如果这些不被单独建模,模型就容易在两头出错:要么该记的不记,要么不该持久化的信息也写进去。
12.3 当前项目的 memory 信号¶
当前训练集共有 103 条记录,其中 memory 记录 34 条,且 memory success rate 为 100%。这说明 memory 并不是项目中的附属项,而是一个被明确保留和单独统计的核心能力维度。
12.4 为什么 memory 数据特别适合早期显式构造¶
因为 memory 的正确行为通常非常依赖规范。如果把它完全交给线上自然生成,很难得到高质量、可解释的训练信号。相反,早期通过受控模板显式构造,反而更容易建立稳定基础。
13. 安全阻断:block 样本的边界作用¶
Agent 与普通生成模型相比,一个更危险的地方在于它真的会“动手”。一旦模型具备工具调用能力,安全问题就不再只是“说错话”,而可能变成“做错事”。
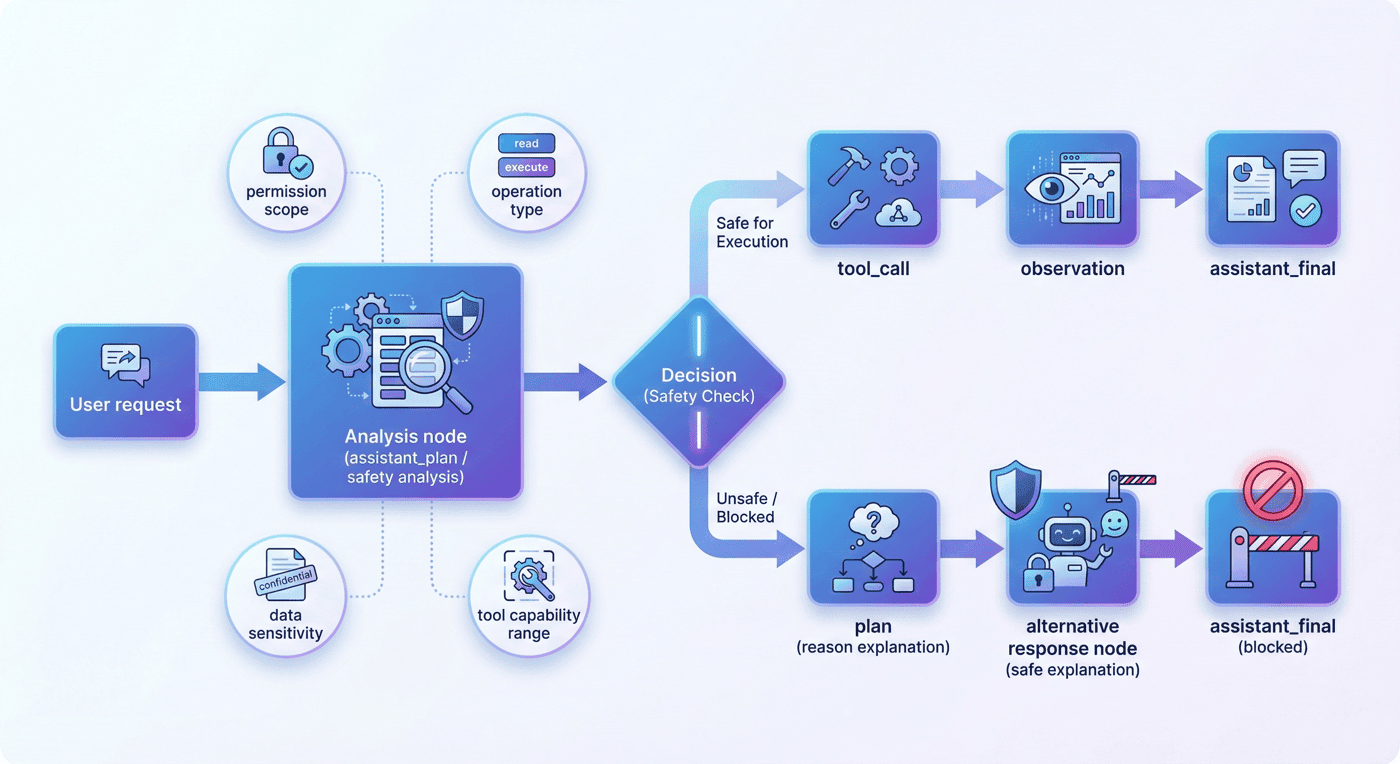
13.1 unsafe block 在项目中解决什么问题¶
unsafe block 解决的是:
- 请求是否越权;
- 是否涉及危险操作;
- 是否应拒绝执行;
- 是否应只做信息性回应而不真正调用工具。
13.2 为什么 block 不等于“简单拒答”¶
block 样本的价值,不只是让模型学会说“不行”,而是让它学会在工具使用场景下做结构化阻断:
- 识别风险来源;
- 不触发危险调用;
- 在可行时提供更安全的替代说明;
- 不让系统状态进入不受控区域。
13.3 当前项目的安全信号¶
当前 unsafe block rate 为 100%,未授权工具调用率为 0%,训练集中的 safety 记录为 9 条。这说明尽管样本规模不大,但项目已经明确把安全边界纳入核心评估。
13.4 为什么 block 数据应该早期进入训练集¶
因为安全边界如果只在推理侧用规则补,很容易出现“模型想做,规则在拦”的对抗状态。更好的方式是让模型在训练时就学会哪些事情不该做。
14. 数据重组与训练封装:日志到训练接口¶
环境跑完之后,项目并没有直接把执行日志原样扔给训练框架,而是做了一步很关键的后处理:把事件级记录重组为训练资产。
14.1 为什么原始日志不适合直接训练¶
因为日志更适合机器记录,不一定适合模型学习。原始日志通常:
- 粒度不统一;
- 格式偏执行而非监督;
- 缺少明确的 instruction / output 对齐;
- 不利于做 train / val / smoke 切分;
- 不便于后续版本管理。
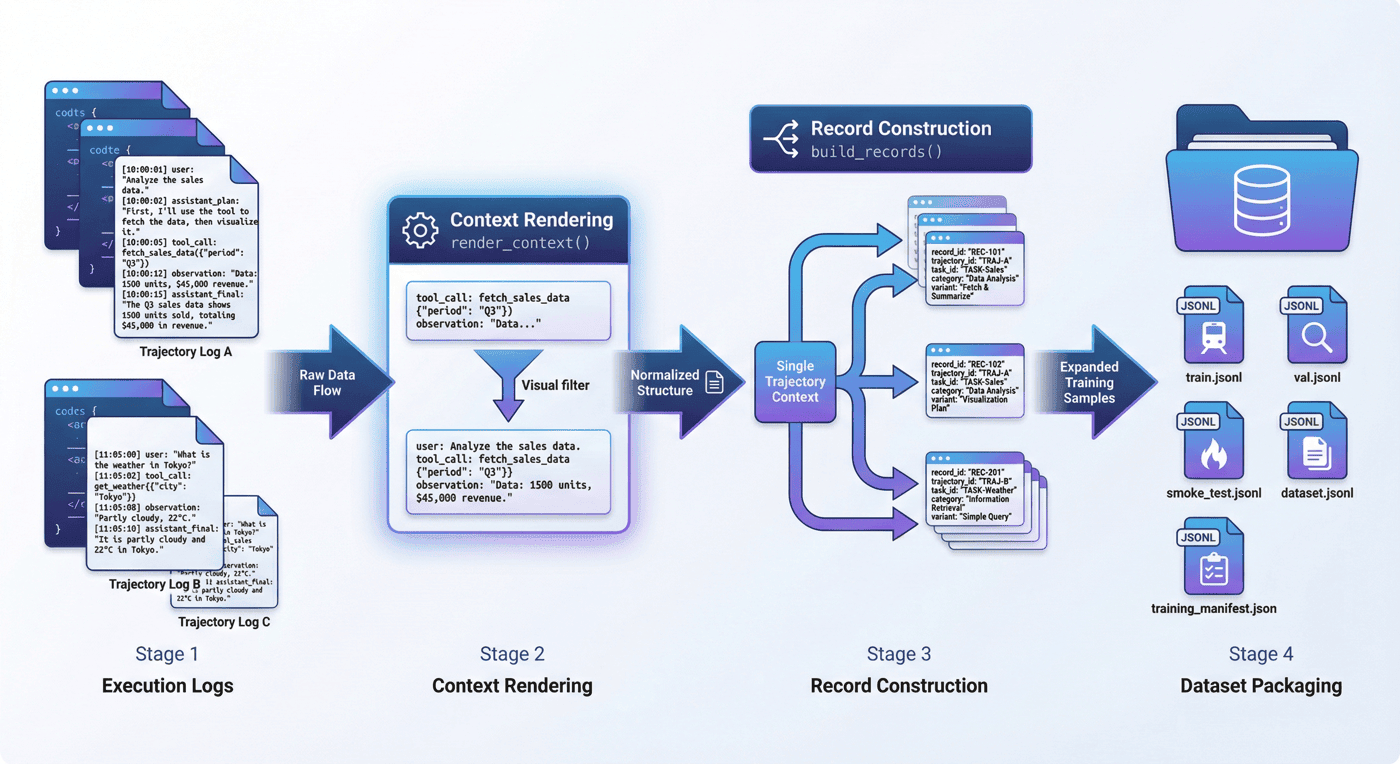
14.2 轨迹重组的实现方式¶
src/prepare_agent_dataset.py 的关键,不是简单做文件拷贝,而是把整条轨迹拆成事件级训练记录。这里最核心的两个函数是:
render_context(events):把用户、计划、工具调用、观察结果渲染成统一上下文;build_records(trajectory):基于执行后的轨迹,逐步生成训练记录。
例如 render_context() 会把不同事件统一改写成可读的文本形式:
# src/prepare_agent_dataset.py
def render_context(events: list[dict]) -> list[str]:
rendered = []
for event in events:
if event["event_type"] in {"user", "assistant_plan", "assistant_final"}:
rendered.append(f"{event['event_type']}: {event['content']}")
elif event["event_type"] == "tool_call":
rendered.append(f"tool_call: {event['tool_name']} {event['arguments']}")
else:
rendered.append(f"observation: {event['tool_name']} -> {event['content']}")
return rendered
这一步很像把“系统日志”翻译成“训练可消费语境”。
而 build_records() 更进一步,它并不是一条轨迹只产出一条样本,而是沿着步骤不断产出带 record_id、trajectory_id、task_id、category、variant 等字段的监督记录。这也是为什么最终训练集虽然只有 22 条原始轨迹,却能形成 103 条训练记录。
14.3 训练接口层产物¶
项目最终输出了:
data/training/agent_tooluse_dataset.jsonldata/training/train.jsonldata/training/val.jsonldata/training/smoke_test.jsonldata/training/training_manifest.json
这说明项目的输出已经不是“几份运行结果”,而是一组可直接被训练侧消费的资产。
15. 指标体系:工具成功率之外的信号¶
做 Agent 项目时,很多团队最容易盯住一个数字:工具调用成功率。这个指标当然重要,但如果只看它,很容易误判整个项目。
15.1 当前项目的关键指标¶
当前项目的核心指标包括:
- 工具 schema:
6 - 模板数量:
5 - 原始轨迹:
22 - 变体分布:
success = 10、recovery = 9、block = 3 - 工具调用成功率:
78.57% - 轨迹成功率:
100.00% - 恢复成功率:
100.00% - unsafe block rate:
100% - memory success rate:
100% - 未授权工具调用率:
0% - 训练记录数:
103
15.2 为什么工具成功率不等于任务成功率¶
工具调用成功率衡量的是“单次调用是否顺利”,但轨迹成功率衡量的是“整个任务是否被完成”。如果项目显式建模了 recovery,那么某次单工具调用失败后被修复,并最终完成任务,这在 Agent 视角里仍然是成功。
15.3 为什么这组指标有工程意义¶
这组指标最有意思的地方就在于:工具调用成功率只有 78.57%,但轨迹成功率和恢复成功率都达到 100%。这恰恰说明 recovery 机制已经在数据层发挥了作用。
这里的低工具成功率并不自动等于系统无效,反而可能意味着:项目确实把失败与修复纳入了训练信号,而不是只保留理想路径。
16. 指标解读:恢复能力的权重¶
一个非常常见的误区是:觉得好的 Agent 应该尽量“不出错”。在理想世界里当然如此,但从数据工程视角看,这个目标并不现实。
16.1 真正可用的 Agent 应该具备什么能力¶
真正可用的 Agent,至少需要三层能力:
- 第一层:正常情况下能完成任务;
- 第二层:异常情况下能恢复任务;
- 第三层:危险情况下能阻断任务。
如果只训练第一层,那么模型在演示里看起来很漂亮,但在真实世界里会非常脆弱。
16.2 recovery 为什么比“纯净 success 数据”更珍贵¶
因为 recovery 样本让模型学到的是一种更接近系统智能的行为:
- 识别问题;
- 理解失败原因;
- 生成修复动作;
- 再次尝试;
- 在必要时切换策略。
这些能力远比“第一次就成功”更难,也更有现实价值。
16.3 为什么这层解读必须保留¶
如果只报数字,78.57% 很容易被误读为“偏低”的结果。但一旦放回 Agent 场景中,它反而说明项目没有美化数据,而是在如实保留并利用失败恢复行为。
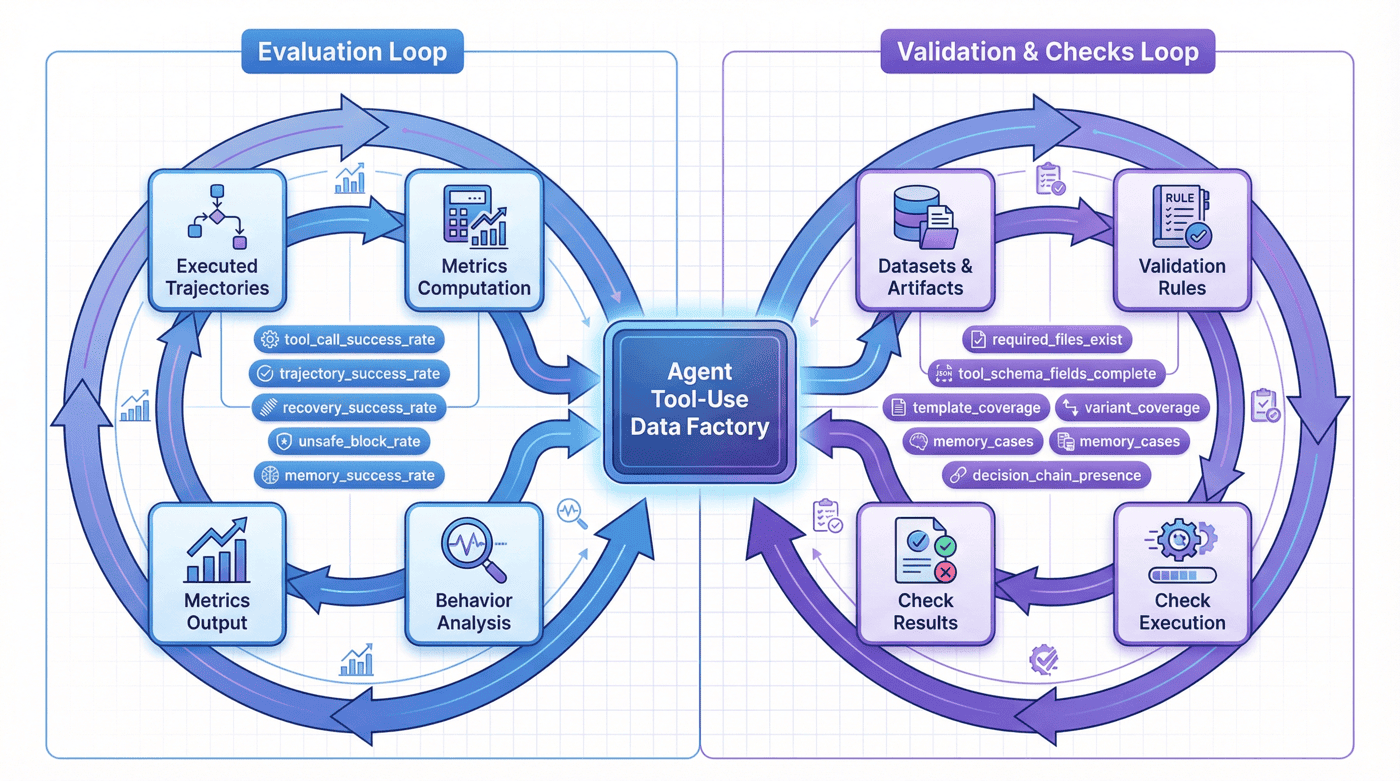
17. 评估与检查:表现评估与一致性检查¶
很多项目做到能跑出指标就结束了,但在数据工厂语境里,这还不够。因为即使指标看起来合理,代码、数据、报告三者之间也可能并不一致。
17.1 评估回答什么问题¶
评估回答的是:
- 工具调用整体是否有效;
- recovery 是否成功;
- memory 是否正确;
- block 是否生效;
- 训练数据分布是否符合预期。
17.2 指标计算的结构¶
src/evaluate_tooluse.py 并不是简单统计条数,而是把工具层、轨迹层、恢复层、安全层和 memory 层指标放在同一份 metrics 字典中统一输出。这一点很适合在章节里点明,因为它体现了 P07 的评估对象不是单一 success,而是完整行为分布。
从源码结构看,指标至少包括:
tool_schema_counttemplate_counttrajectory_countcategory_distributionvariant_distributiontool_call_success_ratetrajectory_success_raterecovery_success_rateunsafe_block_rateunauthorized_tool_call_ratememory_success_rate
也正因为评估脚本是基于执行后产物和 manifest 统一计算的,当前报告中才会同时出现“工具调用成功率 78.57%”与“轨迹成功率、恢复成功率均为 100%”这样的组合,而不是只报一个孤立数字。
17.3 检查回答什么问题¶
检查回答的是:
- 必要文件是否齐全;
- 工具 schema 字段是否完整;
- 模板是否覆盖单步、多步和安全场景;
- 轨迹变体是否完整;
- 观察与决策链是否存在;
- memory 相关 case 是否成功;
- 代码和报告是否对得上。
17.4 检查机制的落地方式¶
src/run_p7_checks.py 先做命令级检查,再做数据/产物级检查。命令级检查里直接运行 py_compile 和 evaluate_tooluse.py;数据级检查里则逐条验证 required_files_exist、tool_schema_fields_complete、templates_cover_single_multi_and_safety、variant_coverage、observations_and_decision_chain_present、memory_cases_succeed 等规则。当前项目总检查项 12 个,全部通过,总体状态为 PASS。
这一步非常重要,因为它让本章不只是“有一份 notebook 讲故事”,而是“有一条代码可验证、产物可核查、报告可回溯的工程闭环”。
18. 当前项目的局限与风险:方法样板的边界¶
写局限并不是削弱项目,而是在提高项目可信度。P07 目前至少有三个明确局限。
18.1 工具范围仍然较小¶
当前工具种类只有 6 类,能够展示方法,但还不足以逼近真实企业 Agent 中那些复杂、多权限、多系统耦合的工具空间。
18.2 调用层本身仍不够稳定¶
工具调用成功率 78.57% 说明原始调用层依然存在脆弱性。虽然 recovery 层把任务成功率拉回来了,但这并不意味着底层调用问题已经解决。
18.3 安全边界还不够丰富¶
现有 unsafe block 和未授权调用样本已经覆盖了最基本的边界,但距离真实世界中的越权链路、提示注入、敏感数据外传和复杂权限协商还有很大空间。
18.4 为什么局限要提前写出来¶
因为一个方法样板真正的价值,不在于假装自己已经解决了一切,而在于让后来者知道:下一步最值得投入的地方在哪里。
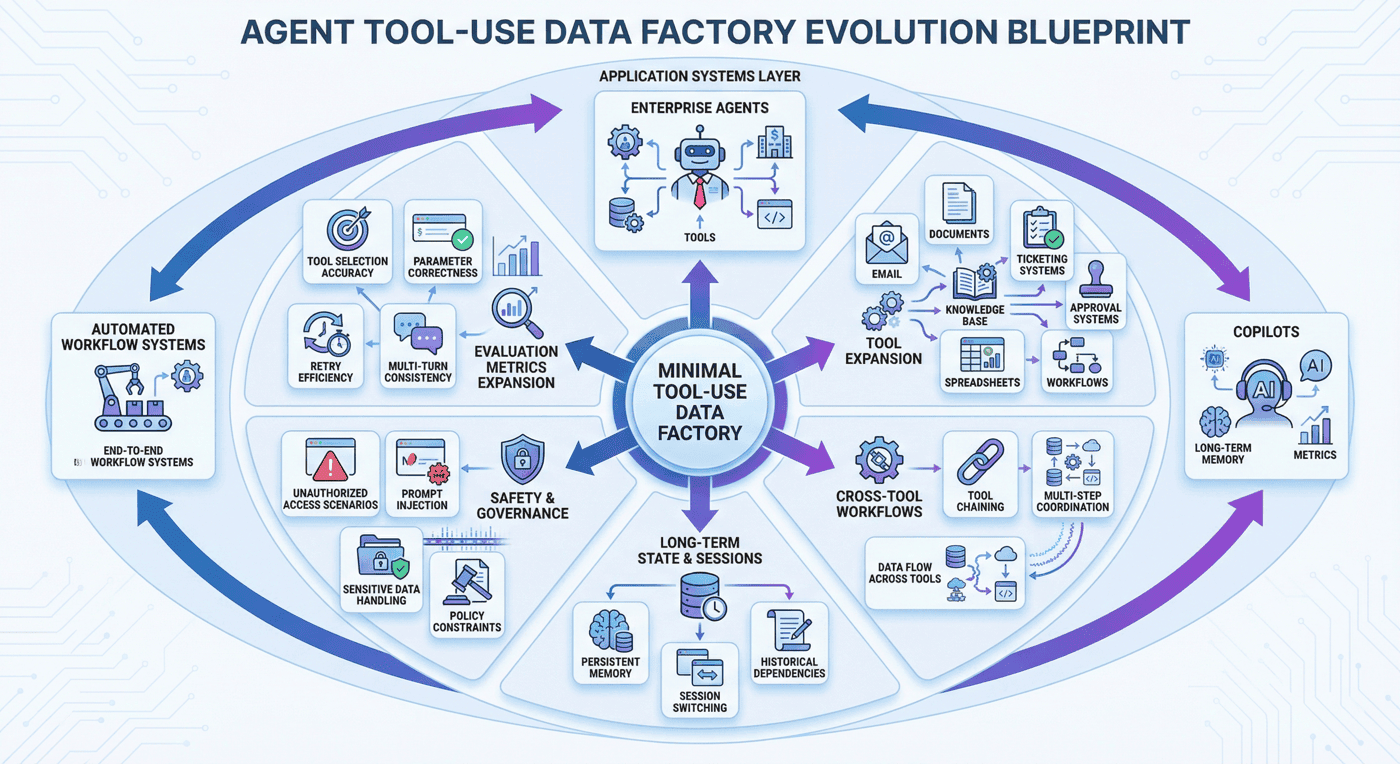
19. 扩展方向:走向更真实的企业 Agent¶
如果把 P07 视作一个最小可复现的 Agent 数据工厂,那么下一步的扩展方向至少包括以下几类。
19.1 扩展工具类型¶
从当前的 search、db、calendar、code、memory 等基础工具,进一步扩展到邮件、文档、工单、审批、知识库、表格、工作流等更接近企业真实场景的能力。
19.2 扩展跨工具链路¶
很多真实任务不是单工具完成的,而是需要检索、查询、计算、写入、通知等多步骤协作。后续可以重点补强这类跨工具链路样本。
19.3 扩展跨会话状态¶
目前项目已经覆盖 memory,但更复杂的长期状态管理、会话切换、任务恢复和历史依赖仍值得继续建设。
19.4 扩展安全治理¶
未来可以引入更丰富的越权调用、提示注入、敏感信息泄露、数据污染和策略绕过场景,让安全边界真正接近上线前要求。
19.5 扩展评估维度¶
除了当前指标外,还可以增加更细粒度的工具选择准确率、参数正确率、重试效率、最终回答质量和多轮一致性指标。
20. P07 的关键位置:连接“会说”与“会做”的能力层¶
在很多教程里,大模型工程仍停留在“让模型回答更像样”这一步。但 Agent 场景提出了一个更高的要求:模型不仅要会说,还要会做;不仅要会做,还要能在做错时修回来;不仅要能修回来,还要知道什么时候根本不该做。
P07 的意义就在这里。它不是要证明自己已经是一个成熟企业 Agent,而是要说明:
- 工具使用行为可以被结构化;
- 恢复轨迹可以被训练化;
- 记忆行为可以被显式建模;
- 安全阻断可以进入监督层;
- 执行、评估和检查可以形成闭环。
这使得它在整体能力链中承担了一种承上启下的作用:它把“语言监督”推进到了“行为监督”。
21. 与普通函数调用数据的区别:Agent 行为数据的特征¶
表面看,P07 也包含工具 schema、调用参数和执行结果,因此有人可能会觉得它和常见 function calling 数据没有本质区别。但其实二者差异很大。
21.1 普通函数调用数据更强调单次映射¶
传统 function calling 样本通常关心的是:
- 用户意图是什么;
- 应该调用哪个函数;
- 参数如何填充;
- 返回值如何呈现。
这是一种“输入 -> 调用 -> 输出”的静态映射。
21.2 Agent Tool-Use 更强调行为过程¶
P07 更强调的是:
- 为什么现在应该调用工具;
- 如果调用失败怎么办;
- 如果需要多轮记忆怎么办;
- 如果请求危险怎么办;
- 如何把多步行为沉淀为训练资产。
这已经不是简单的 function calling,而是更接近“可执行智能体的行为数据工程”。
21.3 为什么这个区分必须在章节里写清楚¶
因为很多团队会低估 Agent 数据难度,觉得多加几个函数调用样本就够了。P07 恰好说明:真正困难的不是“能不能调”,而是“调错了怎么办、该停时能不能停、跨轮时能不能记住”。
22. 向其他 Agent 场景迁移:P07 的方法样板价值¶
Agent Tool-Use 并不是唯一需要行为数据工厂的方向,但它是一个非常好的样板。原因在于,它同时具备以下特征:
- 工具空间明确;
- 行为链可拆解;
- 恢复机制重要;
- 安全边界刚性;
- 评估闭环必要。
这些特征,其实同样存在于企业 Copilot、自动化工作流助手、开发助手、运维助手和多代理协作系统中。
22.1 哪些设计可以直接迁移¶
- 从工具 schema 到任务规格的定义链路;
- success / recovery / block 并行建设的思路;
- 模拟环境先行、真实环境后接入的策略;
- memory 与安全边界单独建模的做法;
- 训练封装与检查闭环。
22.2 哪些部分不能直接照搬¶
- 工具种类和权限体系必须重写;
- 企业场景中的安全边界通常更复杂;
- 多团队协作的工作流比单 Agent 场景更难;
- 真实系统的异常类型远多于模拟环境。
22.3 最具迁移性的核心方法¶
真正能迁移的不是某个调用模板,而是这条方法链:
定义工具空间 -> 设计任务规格 -> 构造 success / recovery / block 轨迹 -> 在环境中执行并记录 -> 重组为训练资产 -> 建立评估与检查闭环。
23. 主要交付物清单¶
这里给出主要交付物清单。
23.1 工具与处理中间产物¶
data/processed/tool_schemas.jsondata/processed/trajectory_templates.jsondata/processed/task_specs.jsondata/processed/raw_trajectories.jsonldata/processed/executed_trajectories.jsonldata/processed/tool_execution_log.jsonldata/processed/execution_summary.json
23.2 训练接口产物¶
data/training/agent_tooluse_dataset.jsonldata/training/train.jsonldata/training/val.jsonldata/training/smoke_test.jsonldata/training/training_manifest.json
23.3 报告与验证产物¶
data/reports/p7_report.mddata/reports/p7_metrics.jsondata/reports/p7_test_results.jsondata/reports/p7_test_report.md
这份交付物列表说明,P07 最终沉淀下来的不是“跑通一次实验”,而是一套从工具定义到训练接口再到评估报告的完整资产。
24. 结语:Agent 数据工厂真正要训练的,不只是调用动作,而是行为能力¶
很多人在看到 Tool-Use 项目时,第一反应是把它理解成“让模型学会调用函数”。但 P07 所展示的,其实是更深一层的东西:
它训练的不是一个机械 API 触发器,而是一个在工具世界中工作的行为系统。这个系统需要知道:
- 什么情况下应该行动;
- 行动时该如何调用;
- 调错了怎样修复;
- 有状态时如何记忆;
- 有风险时如何停止。
从这个意义上说,P07 的价值并不只在于它现在有多少样本、多少工具、多少指标,而在于它明确回答了一个对 Agent 时代非常重要的问题:
如果我们想让模型真正学会“做事”,那就必须把行为本身变成数据工程对象。
这正是 Agent Tool-Use 数据工厂的核心意义。
专题:场景库建设与上线前门禁¶
Agent Tool-Use 项目在真正落地前,最容易出问题的地方并不是“模型会不会调工具”,而是“团队有没有把场景库和门禁条件建完整”。如果只有少量演示任务,系统看起来很聪明;一旦进入真实环境,工具空间、异常类型和安全要求同时放大,问题就会迅速暴露。
一、场景库不能只覆盖成功路径¶
一个可用的 Agent 场景库,至少应同时覆盖三类内容:
- 常规成功任务,验证模型能否在标准前提下完成目标;
- 恢复型任务,验证模型在工具失败、参数缺失或环境冲突时能否回到正轨;
- 阻断型任务,验证模型在越权、敏感或不合规请求前能否停下来。
这三类任务缺一不可。只有 success,没有 recovery,系统会在真实环境中显得脆弱;只有 success 和 recovery,没有 block,系统就会在高风险场景里失控。P07 当前最有方法价值的地方,就是已经把这三种轨迹视为并列资产,而不是把恢复和阻断当成附属样本。
二、门禁应覆盖工具正确性、恢复能力和安全边界¶
Agent 项目上线前,至少值得建立三道门禁:
- 工具正确性门禁,确认模型会选对工具、填对关键参数、理解返回结果;
- 恢复能力门禁,确认模型在报错、冲突和中断后能采取合理的下一步;
- 安全边界门禁,确认模型不会在禁止条件下继续行动,也不会被简单诱导绕过策略。
如果系统只通过第一道门禁,看起来像“会用工具”,但实际上还不具备进入真实流程的资格。因为真实流程中,错误与风险几乎一定会发生,恢复能力和安全阻断能力并不是少数边角需求,而是主链能力。
三、场景库需要随着失败案例持续更新¶
P07 这类项目的场景库不应该是一次性写完的,而应该随着 failure replay 持续增长。每当系统在某类场景里出现以下问题时,都值得把它吸收到场景库中:
- 工具选对了,但参数理解错了;
- 工具调用失败后重复犯同样的错误;
- 本应转向 memory 或澄清步骤,却盲目继续执行;
- 明明触发了安全策略,却仍试图寻找绕过路径;
- 多工具协作时中间状态丢失,导致后续行为漂移。
这样建设出来的场景库,才能真正代表系统最脆弱的边界,而不是只代表系统最擅长展示的部分。
专题:Agent 行为数据的运营与复盘机制¶
和普通函数调用样本相比,Agent 行为数据更像一种“操作日志资产”。既然它描述的是行为过程,就更需要运营和复盘机制来不断校正。否则,哪怕训练集不断变大,团队也可能只是把旧问题换一种方式继续积累。
一、复盘粒度应落在“行为链”上¶
很多团队在复盘 Agent 问题时,习惯只看最终结果:任务成功了还是失败了。但对 Tool-Use 来说,更有效的复盘粒度通常是行为链本身。例如:
- 第一步为什么选了这个工具;
- 第二步为什么忽略了返回值里的警告;
- 第三步为什么没有触发澄清;
- 第四步为什么在越权条件下仍继续执行;
- 最终失败是因为单步错误,还是因为整个策略路径不合理。
只有把复盘粒度落在行为链上,团队才真正有机会把问题转回训练资产,而不是停留在“这次又没做对”的模糊描述里。
二、运营机制要让多角色看同一条轨迹¶
Agent 项目天然涉及多种角色:数据工程、模型工程、平台、安全、产品。不同角色对同一个问题的关注点并不一样,但最好让他们都围绕同一条轨迹讨论,而不是各看各的摘要。
一个更有效的运营方式通常是:
- 统一保留关键轨迹与执行日志;
- 在评测报告中显式列出代表性 success、recovery 和 block 案例;
- 对高风险失败场景建立固定 replay 集;
- 在版本评审时优先讨论“哪些轨迹已修复,哪些轨迹仍未稳定”。
这样做的价值,在于让不同角色虽然关注点不同,但能对系统问题形成同一幅画面。对于行为型系统来说,这种共享视图非常重要。
三、Agent 数据工厂最终要服务持续迭代¶
P07 当前已经展示了一个很关键的方法论:行为数据不是生成出来就结束,而是要在执行、评估、复盘和再训练中不断循环。未来如果继续扩展到更真实的企业 Agent 环境,这条循环会越来越重要。
从长期看,团队最需要沉淀下来的不是某个单独模板,而是以下能力:
- 能持续新增高价值场景;
- 能持续把失败案例转成 replay 与训练样本;
- 能持续更新安全边界和阻断规则;
- 能持续跟踪多轮记忆、恢复效率和最终任务完成率。
只要这几件事开始形成固定节奏,Agent Tool-Use 数据工厂就不再只是一个项目章节,而会逐步演化成真正的行为数据基础设施。